728x90
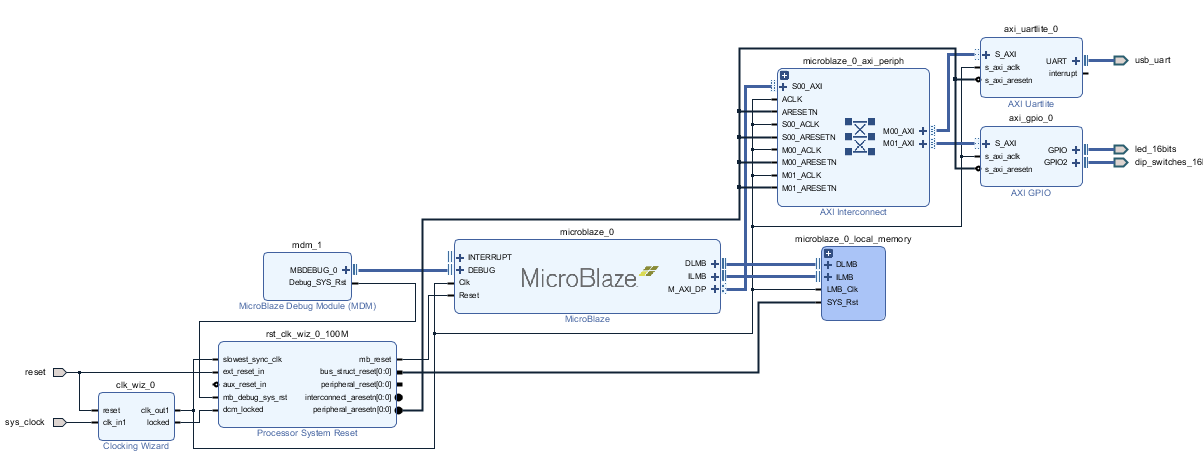
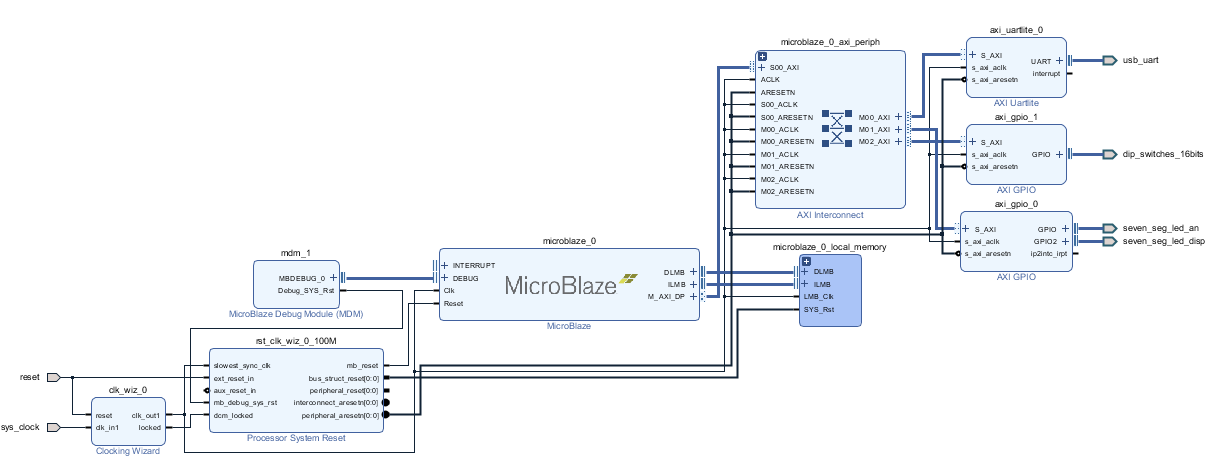
Create Block Design을 클릭하고 아래와 같은 블럭을 만들었다.
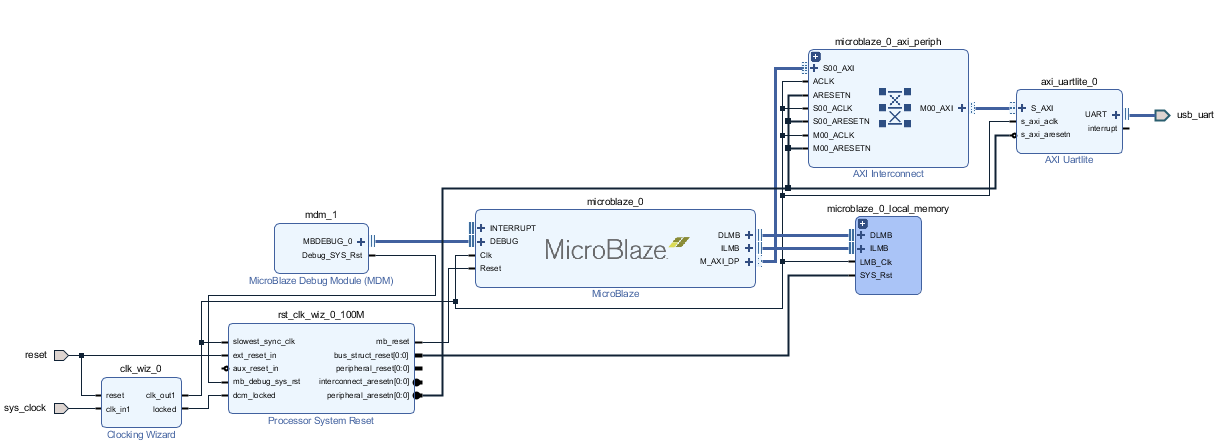
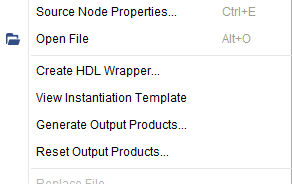
위 블럭을 토대로 코드를 구현하고 싶다면,
Create HDL Wrapper를 클릭하면 아래와 같은 기본적인 코드가 자동으로 형성되는 것을 확인할 수 있다.
module micro_blaze_hello_wrapper
(reset,
sys_clock,
usb_uart_rxd,
usb_uart_txd);
input reset;
input sys_clock;
input usb_uart_rxd;
output usb_uart_txd;
wire reset;
wire sys_clock;
wire usb_uart_rxd;
wire usb_uart_txd;
micro_blaze_hello micro_blaze_hello_i
(.reset(reset),
.sys_clock(sys_clock),
.usb_uart_rxd(usb_uart_rxd),
.usb_uart_txd(usb_uart_txd));
endmodule
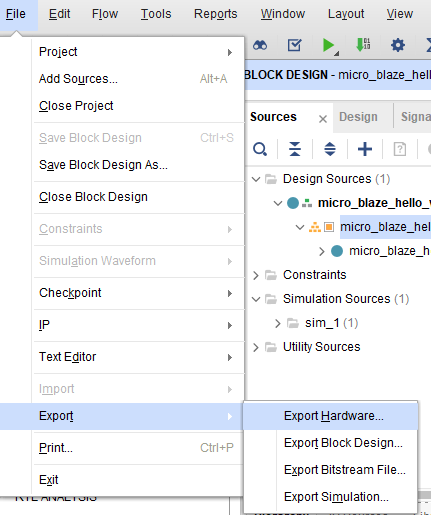
Bitstream을 먼저 진행한 후, 아래와 같이 추가적인 과정을 필요로 한다.


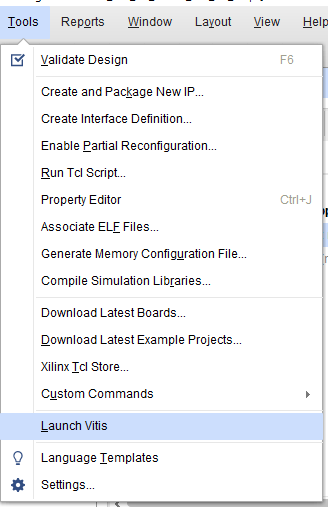
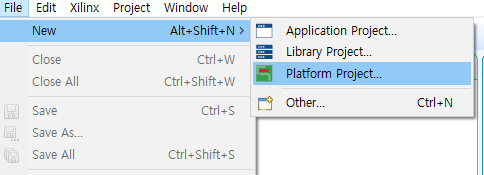
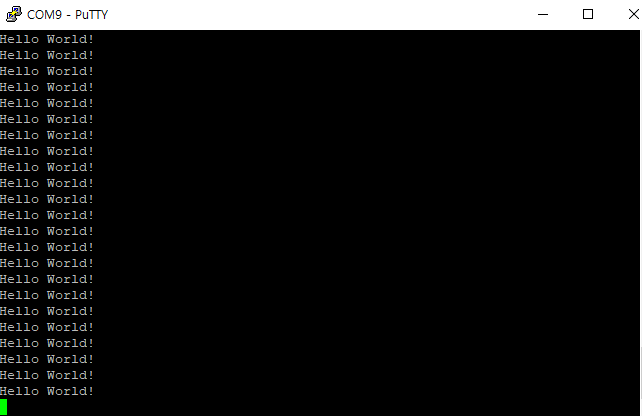
플랫폼에서 아래와 같은 코드를 실행하면 PuTTY에는 다음과 같은 결과가 나오는 것을 확인할 수 있다.
아래는 반복적으로 Hello World를 출력하는 코드와 출력 결과 화면이다.
#include <stdio.h>
#include "platform.h"
#include "xil_printf.h"
int main()
{
init_platform();
print("Start!\n");
while(1)
{
print("Hello World!\n\r");
MB_Sleep(1000);
}
cleanup_platform();
return 0;
}
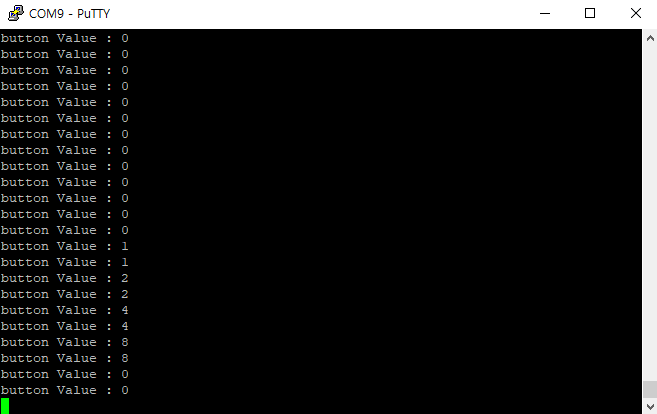
버튼을 활용한 코드를 구현하면 아래와 같이 구현되며, 출력 결과는 아래와 같다.
#include <stdio.h>
#include "platform.h"
#include "xil_printf.h"
#include "xparameters.h"
#include "xgpio.h"
#define BUTTON_ID XPAR_GPIO_0_DEVICE_ID
#define BUTTON_CHNNEL 1
int main()
{
init_platform();
print("Start!\n\r");
XGpio_Config *cfg_ptr;
XGpio button_instance;
u16 data;
cfg_ptr = XGpio_LookupConfig(BUTTON_ID);
XGpio_CfgInitialize(&button_instance, cfg_ptr, cfg_ptr->BaseAddress);
XGpio_SetDataDirection(&button_instance, BUTTON_CHNNEL, 0b1111);
while(1)
{
data = XGpio_DiscreteRead(&button_instance, BUTTON_CHNNEL);
xil_printf("button Value : %x\n\r", data);
MB_Sleep(1000);
}
cleanup_platform();
return 0;
}
이번에는 LED와 스위치를 활용한 코드를 작성해보려고 한다.
블록은 아래와 같이 설정하였다.
아래와 같이 코드를 작성한 후, 동작을 시켜보면 스위치를 올릴 때마다 스위치 위의 LED가 점등되는 것을 확인할 수 있다.
#include <stdio.h>
#include "platform.h"
#include "xil_printf.h"
#include "xparameters.h" // 하드웨어 파라미터 정의를 위한 헤더 파일
#include "xgpio.h" // GPIO 제어를 위한 헤더 파일
#define GPIO_ID XPAR_GPIO_0_DEVICE_ID
#define LED_CHANNEL 1
#define SWITCH_CHANNEL 2
int main()
{
init_platform();
print("Start!\n\r");
XGpio_Config *cfg_ptr;
XGpio gpio_instance;
// 버튼 장치의 설정을 조회하여 cfg_ptr에 저장
cfg_ptr = XGpio_LookupConfig(GPIO_ID);
// GPIO 인스턴스를 초기화 (버튼 장치 설정에 맞추어 인스턴스 생성)
XGpio_CfgInitialize(&gpio_instance, cfg_ptr, cfg_ptr->BaseAddress);
XGpio_SetDataDirection(&gpio_instance, LED_CHANNEL, 0);
XGpio_SetDataDirection(&gpio_instance, SWITCH_CHANNEL, 0xffff);
u16 data;
while(1){
data = XGpio_DiscreteRead(&gpio_instance, SWITCH_CHANNEL);
XGpio_DiscreteWrite(&gpio_instance, LED_CHANNEL, data);
// print("Hello World!\n\r");
// MB_Sleep(1000);
}
cleanup_platform();
return 0;
}
이번에는 FND를 제어해보려고한다.
FND는 Anode를 사용하였고, 블록은 아래와 같다.
아래의 코드를 돌려보면, FND가 0000부터 1씩 빠르게 증가하는 것을 확인할 수 있다.
#include <stdio.h>
#include "platform.h"
#include "xil_printf.h"
#include "xparameters.h" // 하드웨어 파라미터 정의를 위한 헤더 파일
#include "xgpio.h" // GPIO 제어를 위한 헤더 파일
#define FND_ID XPAR_AXI_GPIO_FND_DEVICE_ID
#define SWITCH_ID XPAR_AXI_GPIO_SWITCH_DEVICE_ID
#define COM_CHANNEL 1
#define SEG_CHANNEL 2
#define SWITCH_CHANNEL 1
u32 fnd[16] = {
0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xd8,
0x80, 0x98, 0x88, 0x83, 0xc6, 0xa1, 0x86, 0x8e};
int main()
{
init_platform();
print("Start!\n\r");
XGpio_Config *cfg_ptr;
XGpio fnd_instance, switch_instance;
u16 data = 0;
cfg_ptr = XGpio_LookupConfig(FND_ID);
// GPIO 인스턴스를 초기화 (버튼 장치 설정에 맞추어 인스턴스 생성)
XGpio_CfgInitialize(&fnd_instance, cfg_ptr, cfg_ptr->BaseAddress);
XGpio_SetDataDirection(&fnd_instance, COM_CHANNEL, 0);
XGpio_SetDataDirection(&fnd_instance, SEG_CHANNEL, 0);
while(1)
{
data++;
XGpio_DiscreteWrite(&fnd_instance, COM_CHANNEL, 0b1110); // 1의 자리
XGpio_DiscreteWrite(&fnd_instance, SEG_CHANNEL, fnd[data%10]); // data를 10으로 나눈 나머지
MB_Sleep(1);
XGpio_DiscreteWrite(&fnd_instance, COM_CHANNEL, 0b1101); // 10의 자리
XGpio_DiscreteWrite(&fnd_instance, SEG_CHANNEL, fnd[data/10%10]);
MB_Sleep(1);
XGpio_DiscreteWrite(&fnd_instance, COM_CHANNEL, 0b1011); // 100의 자리
XGpio_DiscreteWrite(&fnd_instance, SEG_CHANNEL, fnd[data/100%10]);
MB_Sleep(1);
XGpio_DiscreteWrite(&fnd_instance, COM_CHANNEL, 0b0111); // 1000의 자리
XGpio_DiscreteWrite(&fnd_instance, SEG_CHANNEL, fnd[data/1000%10]);
MB_Sleep(1);
}
cleanup_platform();
return 0;
}
위 코드를 for문으로 바꿔 수정해보면 아래와 같은 코드가 작성된다.
#include <stdio.h>
#include "platform.h"
#include "xil_printf.h"
#include "xparameters.h" // 하드웨어 파라미터 정의를 위한 헤더 파일
#include "xgpio.h" // GPIO 제어를 위한 헤더 파일
#define FND_ID XPAR_AXI_GPIO_FND_DEVICE_ID
#define SWITCH_ID XPAR_AXI_GPIO_SWITCH_DEVICE_ID
#define COM_CHANNEL 1
#define SEG_CHANNEL 2
#define SWITCH_CHANNEL 1
u32 fnd[16] = {
0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xd8,
0x80, 0x98, 0x88, 0x83, 0xc6, 0xa1, 0x86, 0x8e};
int main()
{
init_platform();
print("Start!\n\r");
XGpio_Config *cfg_ptr;
XGpio fnd_instance, switch_instance;
u16 data = 0;
u16 temp = 0b1110;
u16 div = 1;
cfg_ptr = XGpio_LookupConfig(FND_ID);
// GPIO 인스턴스를 초기화 (버튼 장치 설정에 맞추어 인스턴스 생성)
XGpio_CfgInitialize(&fnd_instance, cfg_ptr, cfg_ptr->BaseAddress);
XGpio_SetDataDirection(&fnd_instance, COM_CHANNEL, 0);
XGpio_SetDataDirection(&fnd_instance, SEG_CHANNEL, 0);
while(1)
{
data++;
temp = 0b1110;
div = 1;
for(char i=0; i<4; i++)
{
XGpio_DiscreteWrite(&fnd_instance, COM_CHANNEL, ~(1<<i));
XGpio_DiscreteWrite(&fnd_instance, SEG_CHANNEL, fnd[data/div%10]);
MB_Sleep(1);
div *= 10;
}
}
cleanup_platform();
return 0;
}
728x90
'Language > Verilog' 카테고리의 다른 글
| Vivado : Basys3 Servo motor, Analog 제어, 가변 저항, 포토 센서(조도 센서) (0) | 2024.08.02 |
|---|---|
| Vivado : RGB LED, DC motor (0) | 2024.08.01 |
| Vivado : PWM 제어 (0) | 2024.07.31 |
| Vivado : Basys3 종합 시계 프로젝트 (타이머, 스톱워치, 시계) (2) | 2024.07.30 |
| Vivado : 온도 습도 센서 (0) | 2024.07.25 |